Integrating Underwater Acoustic Remote Sensing and Soil
Investigation Data for Sediment Volume Estimation in Gresik
Jasatama Port Pool, Indonesia
Pratomo, D. G.1* Zahra, A. I. 1 and Azalia,
B. N.2
1Geomatics Engineering Department, ITS Surabaya, Indonesia

2Ministry of Agrarian Affairs and Spatial Planning/National
Land Agency, Indonesia

*Corresponding Author
Abstract
Port is one of the transportation networks that connect sea and
land transportation. Thus, it can be ensured that there are many
activities closely related to port such as planning,
implementation, and maintenance. One of the port maintenance
activities is dredging. The sea current that is always moving
carries sediment towards the port causing sedimentation in the port
pool area and preventing the ship from grounding. Maintenance
dredging is required to remove sediment deposits in the pool port
to maintain the safety depth. Before dredging, the parameter that
has to be considered is the sediment type and its thickness in the
area of interest. The study utilized underwater acoustic remote
sensing instruments such as Sub Bottom Profiler, Side Scan Sonar,
and Multibeam Echosounder to determine the type and thickness of
sediments in the port pool. The validation process for the sediment
types and the Standard Penetration Test value are derived from the
soil investigation data. There are six borehole points at the
research location which have a Standard Penetration Test value. The
research location is in a shallow water area with depth values
ranging from 0.5 m to 7.0 m with respect to Low Water Spring. Based
on the SSS image interpretation, the research location is dominated
by sediment type of clay. The area of interest is 30541.29 m2
and the total volume of the sediment thickness is 82326.7 m3
with respect to the depth design. This sediment volume is dominated
by the soft sediment with the volume of 79614.8 m3. The
couple of underwater acoustic remote sensing and soil investigation
can provide a continuous representation of the sediment thickness
and an essential reference for future research on the estimation of
sediment volume in the port pool.
Keywords: Acoustic Remote Sensing, Pool Port, Sediment
Volume, Soil Investigation
1. Introduction
A port is an area of water protected from waves, used as an anchorage
for ships and other watercrafts used to lift passengers and goods, make
repairs, refuel, and equip wharves for mooring ships and cranes.
Loading and unloading goods, transporting them through warehouses and
storage locations, and waiting for distribution to the destination area
or the next shipment [1]. Terminal Gresik Jasatama is one of the dry
bulk terminals located in Gresik Regency, East Java Province,
Indonesia. This terminal provides various services such as loading and
unloading of industrial materials, cargo bags, log wood, and palm oil.
Due to the increasing traffic activities of ships, maintenance and
inspection of the port area are required to preserve the water depth
from sedimentation. As continuous sedimentation processes cause the
port basin to become shallower, dredging is necessary to maintain the
safety of navigation in the area. The sediment deposition process which
occurs continuously will accumulate surficial sediment at the bottom of
the harbor pond.
The sedimentation rate depends on how prone the area is to the effects
of sedimentation. The area which is located in river mouths and
estuaries have a high risk in sedimentation that may affect shipping
activities as the performance of the port is very dependent on the
depth of the shipping channel and the anchorage pond [2].
This circumstance may affect shipping activities and safety. One of the
activities that can be taken to overcome the accumulation of sediment
in the harbor is to perform a dredging process. However, to carry out
dredging effectively, it is necessary to evaluate the sediment impact
on the harbor area, including the thickness and volume of hard and soft
sediment layers in the waters. One of the ways to identify the thickness
of the sediment in these waters is by observing the seabed using the
acoustic wave. Acoustic methods are currently widely used to detect the
presence of underwater objects. Seabed sediment research utilizing the
acoustic method has been done by Khomsin et al., [3], by analyzing MBES
data. Based on the study, the acoustic method is an effective means to
inspect the seabed sediment and its environment [4]. However, to
identify the layer thickness of the sediment, a Sub Bottom Profiler
(SBP) survey can be used as an alternative approach. SBP is an
instrument which utilizes an acoustic wave to identify sediments on the
seabed sub surface [5]. As it is important to determine the type and
thickness of sediment for dredging planning [6]. The study also used a
Side Scan Sonar to acquire the acoustic imagery of the seabed. Combined
the underwater acoustic remote sensing and the soil investigation data
as a validation, this can be an innovative method to quantify the
sediment volume in the port pool area.
2. Material and Methods
2.1 Study Area
The research area as shown inside a red box in Figure 1 is in the port
pool area of Gresik Jasatama. The area of interest is located in Gresik
Regency, East Java, Indonesia at geographical coordinates between 7° 9'
6.23"S 112° 39' 37.31"E and 7° 8' 57.95"S 112° 39' 41.09"E. The
area of this study is approximately 30541.29 m2.
2.2 Research Methodology
2.2.1 Sub-bottom profiler data processing
The SBP data results the acoustic intensity based on the interaction
between the acoustic wave and features on the seabed surface and the
layers below. These intensities are then digitized as sediment layers
and converted into XYZ data to calculate the sediment volume and to
produce a three-dimensional image of sediment layers. The first step of
SBP processing is filtering the SBP data to remove the water column
effect and retrieve the seabed surface line. SBP is an acoustic
instrument used to obtain information on the sediment and rock layers
below the seabed surface. This underwater acoustic remote sensing
technique emits acoustic waves that have a single channel wave system
and is used to display the seismic profile of the shallow seabed [7].
This underwater acoustic system uses a low frequency that operates
between 2 kHz to 12 kHz to penetrate sediment layers below the seabed
surface.

Figure 1: The area of interest in Gresik Jasatama Port
pool

Figure 2: Geometric kinematic model of acoustic signal
for SBP [8]
The SBP utilizes a sound source that sends an acoustic signal
vertically downward through the water. The receiver will receive the
signal reflected by the seabed and the layers below. Some of the
acoustic signals will penetrate the seabed layer and will be reflected
when it meets the boundary between the two layers which have different
acoustic characteristics, known as acoustic impedance [6].
As shown in Figure 2, the acoustic signal emitted by the O generator
propagates through the water column and the seabed. According to the
principle of seismic reflection geometry, when touching different
shapes, the incident wave will create a reflected wave with angle β
equal to the incident angle α at the interface. The propagation angle γ
is determined by the sound wave propagation speed in the upper and
lower layers at the interface. If the speed of the sound wave in medium
2 below the seabed interface is greater than the speed of the sound
wave in medium 1 above the interface, the transmission angle γ will be
larger than the incidence angle α and vice versa. As the transmitted
wave continues to travel down, new reflected and transmitted waves
continue to be created at subsequent acoustic impedance intersections
until the energy of the transmitted wave is too low to produce a
reflected echo of any energy. To produce a strong reflected echo at a
surface, there must be a clear difference in the acoustic impedance
state at that surface. Therefore, the reflection coefficient R at the
surface is non-zero if the sound wave is excited by detecting a flat
plate at an angle approximately perpendicular to the reflecting
surface. The equation can be expressed as Equation 1 [9].
Equation 1
Where Z1 is the characteristic impedance or wave
impedance that refers to the first medium or the first side in a
transmission and Z2 is the impedance that refers to
the second medium or the second side in a transmission. ρ and v are the
density of the sediment layer and the speed of sound wave propagation
in the layer, respectively, and their product is called the wave
impedance. Subscripts 1 and 2 designate the layers above and below the
interface, respectively. According to the above equation, the condition
that means the reflecting interface can form a reflected echo is that
ρ2v2 is not
equal to ρ1v1; The larger the difference
between ρ2v2 and
ρ1v1
, the stronger the reflected energy. The larger the amplitude of the
reflected signal received by the transducer, the larger the gray value
of the in-phase sound reflection axis displayed by the recording
section, and the clearer the interface of the reflection layers.
Therefore, the reflection interface is also called the wave impedance
interface, which matches the lithological interface of real strata and
represents different lithological horizons [8].
By examining areas with a soil test using drill or borehole samples, it
is possible to extend the usefulness of these samples by identifying
subsurface structures in the images that match the structures shown in
the borehole samples.
Furthermore, digitization is done to obtain an overview of the seabed
surface and sediment layers. Validation is done by comparing the
results of digitization with soil investigation data to identify the
characteristics of the type of sedimentation. Soil investigation is the
first activity which is related to the planning of the substructure
structure 10]. Overall, the aim of a soil investigation is to obtain
technical data or soil parameters that are representative of the local
soil conditions. This activity is expected to provide information on
soil conditions, soil types, groundwater levels, layers of soil
structure, and soil characteristics for foundation planning [11]. In
this study, sediments are classified into two types based on their
Standard Penetration Test (SPT) value: soft sediment has an SPT less
than or equal to 20 and hard sediments which has an SPT more than 20. A
three-dimensional visualization of sediment thickness is used to clarify
the distribution of sediments and display a comparison between soft and
hard sediment layers. Finally, analysis of the sediment volume is
retrieved by calculating the layer above the surface design and the
sediment that needs to be dredged.
2.2.2 Side Scan Sonar Data processing
The Side Scan Sonar (SSS) survey aims to collect the depiction image of
the seabed. This instrument uses the emission of acoustic waves to
determine the sediment type and features present on the seabed. SSS
records backscatter values reflected from the seabed as an electrical
energy. This instrument can distinguish the size of particles that make
up the seabed surface such as rocks, mud, sand, gravel, or other types
of seabed sediment [12].
Seabed sediments can be classified based on their acoustic backscatter
strength, where each type of sediment usually has a different intensity
level. This can be used to investigate the type and spatial
distribution of seabed sediment morphology [13]. One approach to analyze
the relationship between sediment type, incident angle of the acoustic
wave and received backscatter is Angular Range Analysis (ARA) [14]. The
backscatter data is generated and classified using machine learning.
The color distribution is represented using an 8-bit digital number.
Values within the range are assigned to a specific color class. A
larger range value will result in a smaller number of colors.
Specifying a small range will produce a variety of colors.
However, color diversity is not the main factor determining the
classification of seabed types. The multiple images of SSS are merged
into a mosaic imagery. This image makes it possible to classify or
segment several layers of the seafloor based on the texture and
properties of each layer. The mosaic is an image of the seafloor that
preserves information about seafloor characteristics such as intensity
over time and ray averages. The mosaic can be used as a starting point
to examine the distribution of intensity values and results [15].
This research classified a seabed sediment type into three categories
based on its backscatter strength: sand, silt, and clay. To determine
the type of seabed, the ARA method applies the half-scan uniformity
principle and estimates the average backscatter value of the
measurements obtained from the scanned area. Angular reactions will
create sedimentary boundaries that give rise to sediments with
different compositions. Because sand is hard and dense, the backscatter
value of sand is higher than that of silt and clay. When acoustic
signals were obtained on sand, the acoustic signal response was still
relatively high compared to other types, and the graph obtained by
backscatter intensity was also higher. Because silt is physically finer
than sand, alluvial sediments tend to be weaker than sand. Signals
related to sediment type are more likely to be absorbed than signals
related to litter. Sediments with low resistivity are clay. The
structure of these sediments is finer than that of sand or silt. Clay
is the most sensitive of all sediment types according to the Wenworth
classification scale. Almost all the energy emitted from the
transmitter is absorbed by the sediment. Due to this condition, the
strength of this type of sediment is very low [15]. Illustration of
measurements using SSS can be seen in Figure 3.
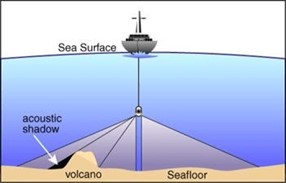
Figure 3: Side scan sonar survey illustration [16]
When conducting a field survey using SSS, the scanning method, width,
resolution, speed, towing height, and transmission line length must be
determined based on the environment and scanning requirements. Based on
these parameters, the direction and distance of the lines should be
designed. Effective towing speed is an important parameter in field
operations using side scan sonar with respect to acquisition range and
image resolution. Theoretically, the pulling speed can be calculated
according to Equation 2 [8].

Equation 2
Where L refers to the mass or load of the conveyed material,
C is the coefficient of friction between the material and the
underside of the conveyor belt, which affects the amount of frictional
force that the conveyor system will need to overcome. R
represents all other resistances that affect the movement of the belt
and H denotes horsepower, a unit of power.
Additionally, if high-resolution images are required, the range of the
target's acoustic signal must be dense, thus requiring a slower tow
speed. Therefore, in field detection, it is necessary to consider the
relationship between detection efficiency and work efficiency. In
general, when the target is sighted, the ship must slow down, and the
tow body must be as close to the seabed as possible to ensure the
safety of the tow fish [8].
Processing SSS data begins with Slant Range Correction (SRC) to remove
blind spots from images on each survey line. Furthermore, a time
varying gain correction is taken to balance the brightness of the image
even though the object is far from the nadir and to compensate for the
characteristics of the detected seabed features. The third stage
involves creating an image mosaic to combine images between data
segments to produce processed image visualizations that display the
surface appearance of the seabed which can be interpreted and
classified based on its texture to obtain sediment characteristics.
Furthermore, analysis of sediment distribution patterns is carried out
based on their characteristics to get sediment distribution patterns.
Interpretation of SSS images can be carried out qualitatively to obtain
the physical properties of the seabed material and determine the shape
of objects or quantitatively to define the relationship between ship
position, to fish position, and object position. The features in SSS
imagery can be classified based on texture observations to recognize the
characteristics of the seabed [17].
3. Results and Discussion
3.1 Sub-Bottom Profiler Analysis
The sediment data obtained from the SBP is used to determine the type
of sediment and the hardness of the layers below the seabed surface.
The study used a pinger system to collect 14 SBP survey lines with an
interval of 10.0m. The Pinger system has a low frequency and is
suitable for shallow water areas. This system provides high resolution
but has low penetration. Thus, the pinger type is often used to detect
relatively shallow objects, for example in the form of a pipe tracker
for the detection of pipes and cables. SBP pinger and chirp are
sometimes combined with side scan sonar (SSS) in a single towing fish,
allowing surface and sub-bottom data to be collected simultaneously
[18].
In the early stages of data processing, a filtering process is
performed to remove the water column which is located above the seabed.
The filtering process used the Dynamic Range and Bottom Tracking
corrections. In the Bottom Tracking process, correction due to waves
(Swell Correction), Median Filter Seabed, and water column correction to
obtain accurate seabed measurements [6]. An overview of the seabed surface and the surface of the sediment layers
from SBP datagram can be seen in Figure 4(a). The seabed surface is
represented by a yellow line and the vertical distance between the sea
surface and seabed is the water column. The
Bottom Tracking and water column process removal result
is shown in Figure 4(b).
A Dynamic Range process was taken to obtain an image with optimal light
intensity. In the process, the display was adjusted by modifying the
color and the density so that differences between sediment layers can
be clearly discriminated. Different color contrasts are used to
indicate the thickness of the sediment layers. The interpretation and
digitization processes of the seabed and the layers with difference
acoustic intensities provide the geospatial information of subsurface
geological layers’ boundaries. This can be used to measure the
thickness of the sediment layers.
In order to validate the SBP data, a soil investigation was performed
in six locations with a depth of 10m below the seabed surface. Based on
the soil investigation results, the types of sediments in this study
are divided into two categories, namely soft and hard sediments. Soft
sediments have an SPT value of less than 20, while hard sediments have
an SPT value greater than or equal to 20. Figure 5(b) shows the overlay
of an SBP image, and the boreholes performed in the same location.
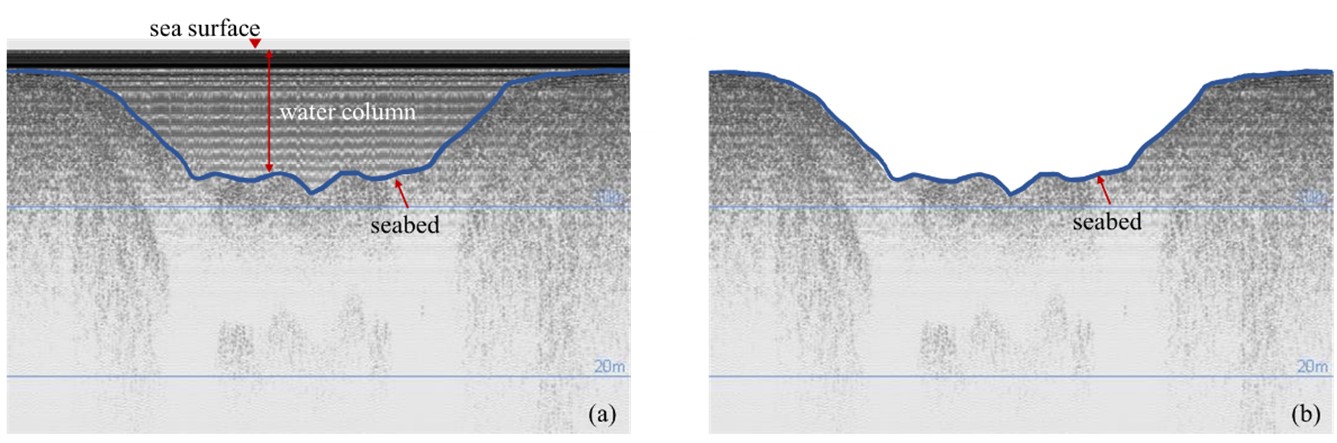
Figure 4: (a) The sub bottom profiler datagram which
includes the sea surface, the water column,
the seabed, and its subsurface layers
(b) The SBP image after applying the bottom tracking and water column
removal process

Figure 5: (a) The digitation process of the SBP
acoustic intensity image which is verified by soil investigation data
(b) The sediment thickness layers image which is resulted from the
digitation process
In this figure, two soil investigations is located in the SBP line. The
blue bar is the soft sediment, and the yellow bar is the hard sediment.
The digitation of the boundary of the difference acoustic intensities
in SBP data is shown in blue line and orange line. This shows that the
soil investigation test in two points is dominated with the soft
sediment.
Figure 5(a) shows the
data collected by the SBP indicates the presence of two layers of
different sediments beneath the seabed. To determine the boundaries of the two layers, on screen digitation
was carried out with respect to the result of soil investigation in the
area. After successfully digitizing, the XYZ coordinates of the two
layers are converted into *.txt file format and corrected to the
vertical reference of Low Water Spring (LWS), which is 1.216m.
3.2 Sediment Type Analysis
In this study, the soil investigation data were taken from six
different points which are scattered in the area of study. Soft
sediments layer (SPT ≤ 20) includes of clay and mud, while hard
sediments layer (SPT > 20) consists of silty clay to loamy silt.
Clay is the smallest particle with a diameter of less than 0.004 mm,
while silt particles have a diameter between 0.004 mm - 0.625 mm [19].
The thickness of each layer varies in each sample. Figure 5(b) is the
result of digitization of soft and hard sediment layers. The soft layer
shown in blue area, and the hard layer shown in a yellow area. The soft
layer in this area consists brownish-gray clay, very soft, with high
plasticity. Whereas the hard layer is in the form of silt clay,
yellowish brown to light brown in color, hard, moderate plasticity,
there are sandstone inserts, very fine to fine in size, in the form of
gravel to boulder with a maximum diameter of 5.0cm.
3.3 Three-Dimensional Sediment Visualization
A three-dimensional sediment surface was created using geospatial data
from the SBP which has been verified with soil investigation. The main
objective of this three-dimensional visualization is to obtain a clear
picture of the sediment types and their distribution at the study site.
In developing the surface model, the research used bathymetric data
from a Multi Beam Echo Sounder (MBES) as the depth reference for the
sediment surfaces.
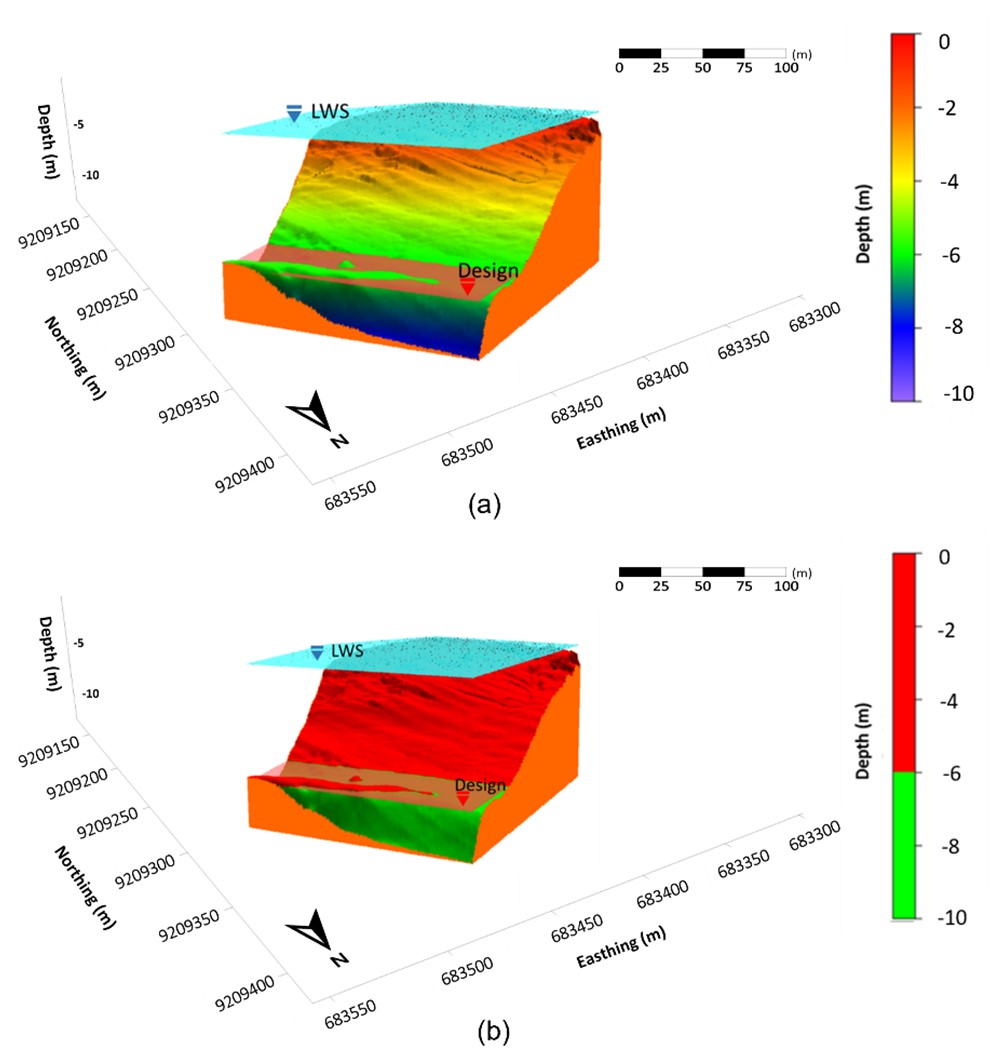
Figure 6: (a) Three-dimensional visualization of the
seabed surface in Gresik Jasatama Port pool and its corresponding
dredging depth design with respect to the LWS. (b) The superimposed of
the dredge design and the seabed surface, red color represents the area
above the depth design, whereas the green color has the depths below
the design
The sediment surface model is developed using the Kriging interpolation
method. This method is one of geostatistical data analysis techniques
which estimates the representative value of a point which is not
sampled by utilizing the surrounding sampled points based on the semi
variogram structural model [20].
Based on the three-dimensional surface analysis, the soft sediment
layer has a maximum thickness of 10.0m, while the thinnest is
approximately 1.0m. The thickness of the hard sediment has a range from
2.5m to 13.0m from the seabed surface. As the port pool area has to
meet the requirements of the safety of navigation, the depth in this
area should be maintained so that ships can navigate safely. The
shallowest depth that should be preserved is 6.0m below LAT.
However, it is apparent that depths in the area range from 0.5m to
7.0m. Therefore, dredging is necessary to be done to have a minimum
depth requirement.
Figure 6(a) represents the three-dimensional seabed surface and the
depth design for dredging. The area that has to be cut is shown in red
color in Figure 6(b). While the area deeper than the depth design is
shown in green color (Figure 6(b)). In the area that has to be dredged
(red color) has two sediment types as the thickness of soft sediment
and hard sediment are in the depth range that has to be dredged. Figure
7 shows the hard sediment surface and the surface design. The surface
above the design has to be cut whereas the surface below the design is
not necessary to be dredged as it has exceeded the predetermined depth.
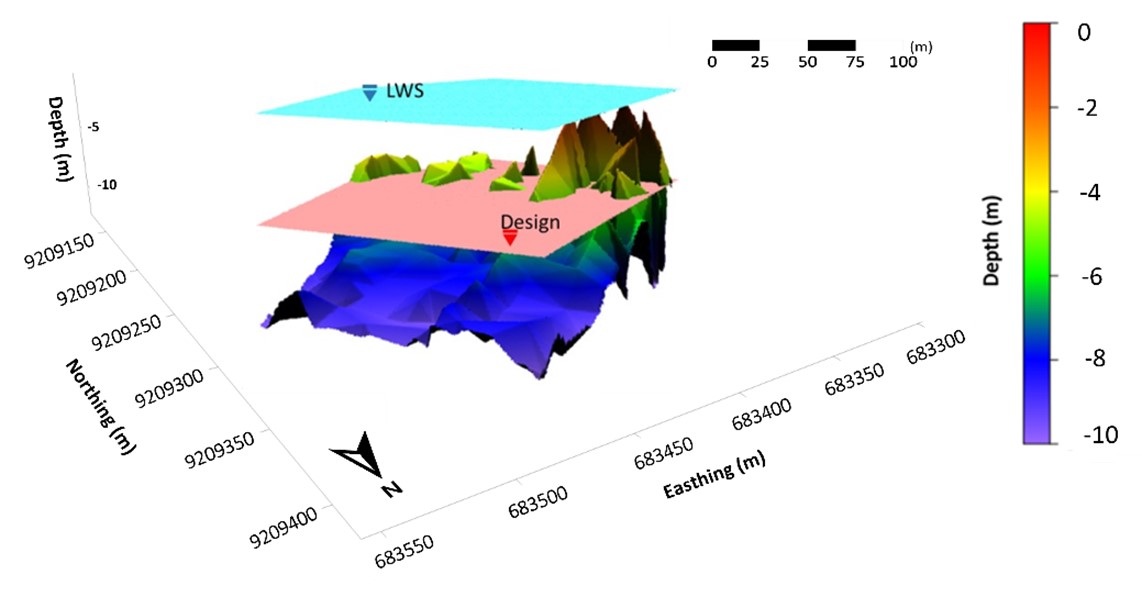
Figure 7: Hard sediments layer over the surface of
depth design
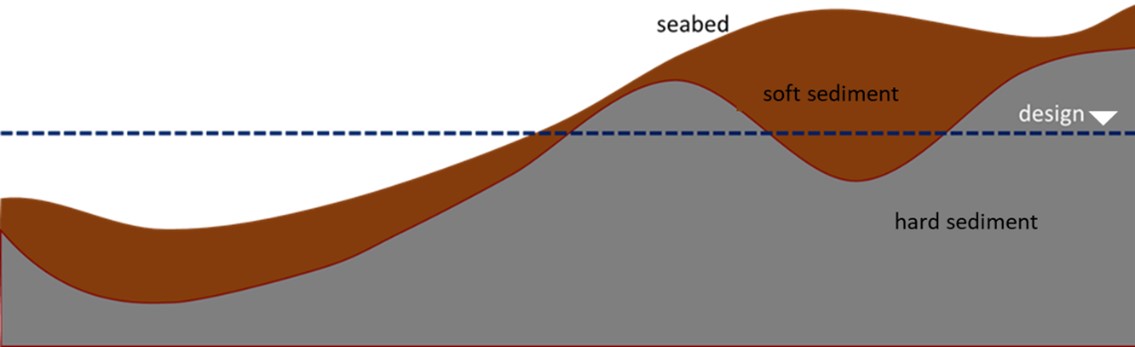
Figure 8: Illustration of hard and soft sediment
layers
Table 1: Sediment volume calculation results
|
Sediment Surface
|
Volume (m3)
|
|
Seabed (MBES)
|
82,326.7
|
|
Soft Sediment Layer (SBP)
|
79,614.8
|
|
Hard Sediment Layer (SBP
|
2,711.9
|
3.4 Sediment Volume Calculation
In this study, the bathymetric data from MBES becomes the surface of
the first layer. Whereas the SBP data is used to derive the second
surface layer. The first sediment layer is referred to as soft sediment
layer, while the second sediment layer is referred to as hard sediment
layer. Based on bore sample, it was determined that the characteristics
of the first (soft) sedimentary layer consisted of brownish gray clay,
very soft and had high plasticity, while the second (hard) sedimentary
layer consisted of light brown (yellowish) silt clay, hard and has
moderate plasticity. Figure 8 represents the illustration on calculating
the sediment volume both soft and hard sediments. Only the areas above
the design line (blue line in Figure 8) are calculated.
The sediment volume of the second layer or hard sediment is calculated
based on the second layer and the dredging depth design. The volume
calculation uses the Triangulated Irregular Network (TIN) method, which
is a vector-based topological data model used to describe the earth's
surface in the form of a relationship between interconnected irregular
triangles. Tabel 1 shows the results of volume calculation of each
layer. Based on the volume calculation results shown in Table 1, the
total dredging volume of the port pool is 82326.7 m3. This
volume consists of the soft sediment layer which has a volume of
79614.8 m 3 and 2711.9 m3of the hard sediment
volume.
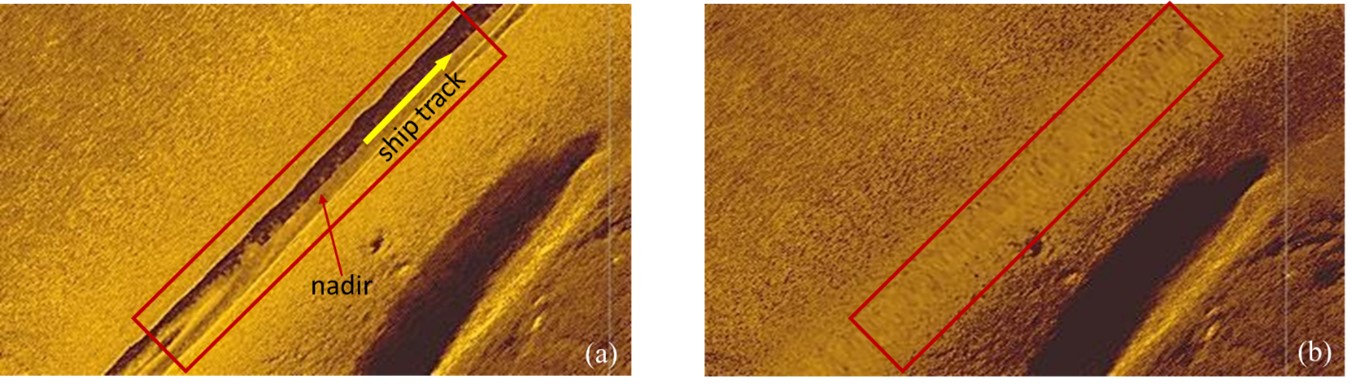
Figure 9: (a) The SSS image with water column track at
the Nadir (inside the red box) (b) The SSS image after removing the water column effect by applying
slant range corrections
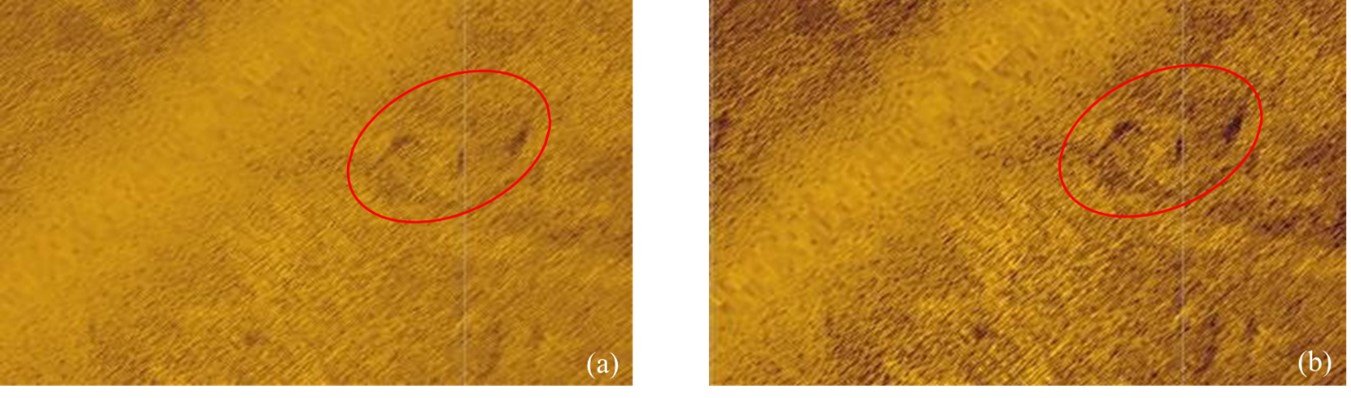
Figure 10: (a) Seabed Features in the SSS image before
applying TVG corrections (b) The SSS image after TVG corrections
3.5 Side Scan Sonar Analysis
In the SSS processing stage, geometric and radiometric corrections have
to be carried out. These corrections include the Slant Range and the
Time Varying Gain. Slant range correction is a geometry correction in
the image that aims to eliminate the blind zone or first return to the
SSS tow fish at nadir which represents the actual position of the
object. While the Time Varying Gain (TVG) is a radiometric correction
related to the improvement of SSS images which aimed at compensating
for the characteristic of the recorded seabed features in SSS imagery.
In Figure 9(a), the appearance of the SSS image before removing water column effect using
Slant Range Correction. The result after applying this correction, can
be seen in Figure 9(b). Figure 10(a) shows that seabed features in the
SSS image cannot be clearly seen. However, after implementing the Time
Varying Gain correction by increasing the amplification of the acoustic
signal intensity, the feature on the seabed surface
can be obviously identified on the SSS image (see inside the red circle
in Figure 10(b)).
The image interpretation of SSS data is performed based on the seabed
texture and the gray level. The roughness level of the seabed features
affects the backscattered strength of the acoustic signal. Sediment
with coarse textures have a stronger backscatter signal and brighter
color intensity compared to finer textures which appear to have a lower
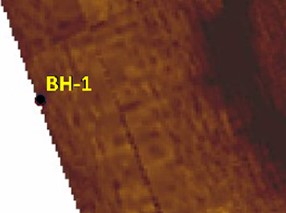
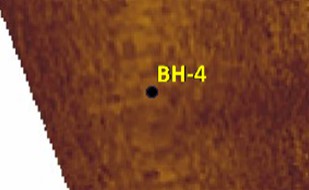
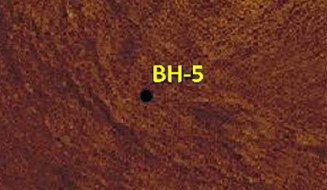
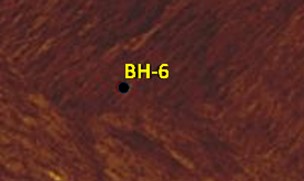
backscattered strength. Table 2 represents the visual appearance of six
samples in the SSS image. These samples are located at the same
position of the boreholes. The sediment is divided into two types,
namely soft and rough as shown in Table 2.
Based on the existing borehole data, it can be recognized that the
seabed surface is dominated by sediment type of clay. There is
unsignificant difference between hard and soft sediments layer on the
seabed surface because they are dominated by silt. This is possible as
the particle size of clay is less than 0.004 mm while the particle size
of silt ranges between 0.004 mm and 0.625 mm.
Table 2: Image
interpretation results and characteristics
|
No.
|
Borehole
|
Sediment Type
|
Image Interpretation
Results and Characteristics
|
|
1.
|
BH-1
|
Soft Layer (Clay)
|
|
|
2.
|
BH-2
|
Soft Layer (Clay)
|

|
|
3.
|
BH-3
|
Soft Layer (Clay)
|

|
|
4.
|
BH-4
|
Hard Layer (Silty Clay)
|
|
|
5.
|
BH-5
|
Hard Layer (Silty Clay)
|
|
|
6.
|
BH-6
|
Hard Layer (Silty Clay)
|
|
4. Conclusion
The research combines underwater acoustic remote sensing methods and
soil investigation to estimate the sediment volume for the purpose of
dredging in a port pool. The area of interest is shallow water with
depth ranges from 0.5 m - 7.0 m with respect to LWS. The seabed surface
is dominated with a soft sediment (clay) composition. Based on the SBP
results, the soft sediment depths range from 1.0 m - 7.0 m from LWS.
Whereas hard sediment layers are located at depths of 2.5 m - 12.0 m
with reference to LWS. The results of the sediment volume calculation
show the total sediment volume that has to be dredged in the area is
79614.8 m3 (96.71%) for soft sediments layer and 2711.9 m3 (3.29%) for hard sediments layer. This research provides a
continuous representation of the sediment thickness and an essential
reference for future research on the estimation of sediment volume in
the port pool.
Acknowledgements
The author acknowledges Directorate of Research and Community Service,
Institut Teknologi Sepuluh Nopember, Surabaya, Indonesia for supporting
this research. The authors are also grateful to APBS Inc. for
supporting the data.
References
[1] Triatmodjo, B., (2009). Perencanaan Pelabuhan.
Yogyakarta: Beta Offset Yogyakarta. 1-253.
https://ebooktekniksipil.files.wordpress.com/2014/05/cvl-perencanaan-pelabuhan.pdf.
[2] Purnomo, S. N., Wahyu, W. and Idham, R., (2015). Analisis
Sedimentasi di Pelabuhan Pendaratan Ikan (PPI) Logending.
Dinamika Rekayasa
Vol. 11(1), 29-37.
https://dx.doi.org/10.20884/1.dr.2015.11.1.93.
[3] Khomsin, Handoko, E. H., Pratomo, D. G. and Yusuf, I. (2018).
Dredging Volume Analysis using Multi Beam Echo Sounder Data.
The 3rd International Conference on Marine Technology, SCITEPRESS -
Science and Technology Publications
, 27-31.
https://doi.org/10.5220/0008550500270031.
[4] Blobdel, P., (2009). The Handbook of Side Scan Sonar.
Springer: New York. 277-278.
https://doi.org/10.1007/978-3-540-49886-5_12.
[5] Sondy, H. M., Yuwono and Pratomo, D. G., (2008). Interpretasi
Hasil Pencitraan Sbp (Sub-Bottom Profiler) Untuk Mendukung. Geoid,
Vol. 4(1).
[6] Khomsin, Pratomo, D. G. and Amirullah, M. D., (2020). Analisis
Data Sub Bottom Profiler Terintegrasi Untuk Identifikasi Sedimen (Studi
Kasus: Alur Pelayaran Timur Surabaya). Geoid, Vol. 15(1).
https://doi.org/10.12962/j24423998.v15i1.4005.
[7] Penrose, J. D., Justy, P., Siwabessy, W., Australia, G.,
Gavrilov, A. N., Parnum, I., Siwabessy, J. W., Gavrilov, A., Parnum, I.,
Hamilton, L. J., Bickers, A., Brooke, B., Ryan, D. A. and Kennedy, P.,
(2006). Acoustic Techniques for Seabed Classification.
https://www.researchgate.net/publication/236952024.
[8] Wu, Z., Fanlin, Y. and Yong, T., (2021).
High-resolution Seafloor Survey and Applications
. Beijing: Science Press.
https://doi.org/10.1007/978-981-15-9750-3.
[9] Liu, G. D., (1978).
Marine Geophysical Exploration (in Chinese).
Beijing: Geological Publishing House. China.
[10] Bahri, S., Makmun, R. R. and Kendar, A. E. (2016). Pemetaan Daya
Dukung Tanah untuk Pondasi Dangkal di Wilayah Pesisir Pantai Kota Bengkulu.
Jurnal Teknik Sipil, Vol. 8(1).
https://doi.org/10.33369/ijts.8.1.
[11] Prayogo, K. and Hasriyasti, S., (2017). Penyelidikan Struktur Dan
Karakteristik Tanah Untuk Desain Pondasi Iradiator Gamma Kapasitas 2 MCi,
Jurnal Perangkat Nuklir, Vol. 10(1).
https://jurnal.batan.go.id/index.php/jpn/article/view/3367.
[12] Manik, H. M., Junaedi, L. and Harsono, G., (2016). Pemrosesan Citra
Side Scan Sonar untuk Pemetaan Dasar Laut Pelabuhan Benoa. JNTETI,
Vol. 5(2).
https://doi.org/10.22146/jnteti.v5i2.231.
[13] Hasan, R. C., Daniel, I., Laurie, L. and Alexandre, S., (2014).
Integrating Multibeam Backscatter Angular Response, Mosaic and Bathymetry
Data for Benthic Habitat Mapping. PLOS One J., Vol. 9(5).
https://doi.org/10.1371/journal.pone.0097339.
[14] Le Chenadec, G., Boucher, J. M. and Lurton, X., (2007). Angular
Dependence of Κ-distributed Sonar Data.
IEEE Transactions on Geoscience and Remote Sensing
, Vol. 45(5).
https://doi.org/10.1109/TGRS.2006.888454.
[15] Manik, H. M., Jaya, I. and Udrekh., (2016). Angular Range Analysis
(ARA) and K-Means Clustering of Multibeam Echosounder Data for Determining
Sediment Type. Jurnal Ilmu Kelautan, Vol. 21(4).
https://ejournal.undip.ac.id/index.php/ijms/article/viewFile/9935/pdf.
[16] Farabi, A. F. and Minarto, E., (2018). Analisa Anomali Bawah
Permukaan Laut Menggunakan Data Side Scan Sonar, Sub-Bottom Profiler dan 2D
High Resolution Seismic. Jurnal Sains dan Seni ITS, Vol. 7(1).
https://doi.org/10.12962/j23373520.v7i1.29184.
[17] Lurton, X., (2002).
An Introduction to Underwater Acoustics: Principles and Applications
. France (FR): Praxis Publ.
[18] Lekkerkerk, H. J., Velden, R. V., Haycock, T., Jansen, P., Vries,
R. D. and Waalwijk, P. V., (2006).
Handbook of Offshore Surveying Volume One: Preparation &
Positioning
. London: Clarkson Research Service Limited.
[19] Wentworth, C. K., (1992). A Scale of Grade and Class Terms for
Clastic Sediments. The Journal of Geology, Vol. 30(5), 377-392.
https://www.jstor.org/stable/30063207.
[20] Fridayani, N. M. S., Kencana, P. E. N. and Sukarsa, K. G., (2012).
Perbandingan Interpolasi Spasial Dengan Metode Ordinary Dan Robust Kriging
Pada Data Spasial Berpencilan (Studi Kasus: Curah Hujan di Kabupaten
Karangasem). E-Jurnal Matematika, Vol. 1(1).
https://doi.org/10.24843/MTK.2012.v01.i01.p012.
